ColdStart - Fast
5分間も待ってられないし40秒で支度しなと言われた時の私的手順。
時間のかかるエラーチェックを飛ばしているので、ランダム故障onでやると死ぬ。
動画
https://steamcommunity.com/sharedfiles/filedetails/?id=2818812095
以降後で書く
AutoStartUpとHotSpawnの違い
自動立ち上げ機能は大体5分ぐらいかかる。
左Win+Homeで実行。左Win+Endで停止。
HotSpawnは立ち上げが完了した状態で出撃になる
自動立ち上げとは異なり、EW/RWR/IFF/DataLink/HMDが有効化されていることもあれば、無い事もあるので要確認。
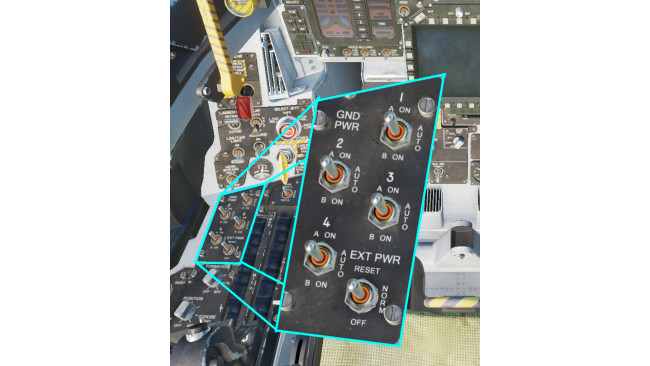
GroundPowerと外部起動
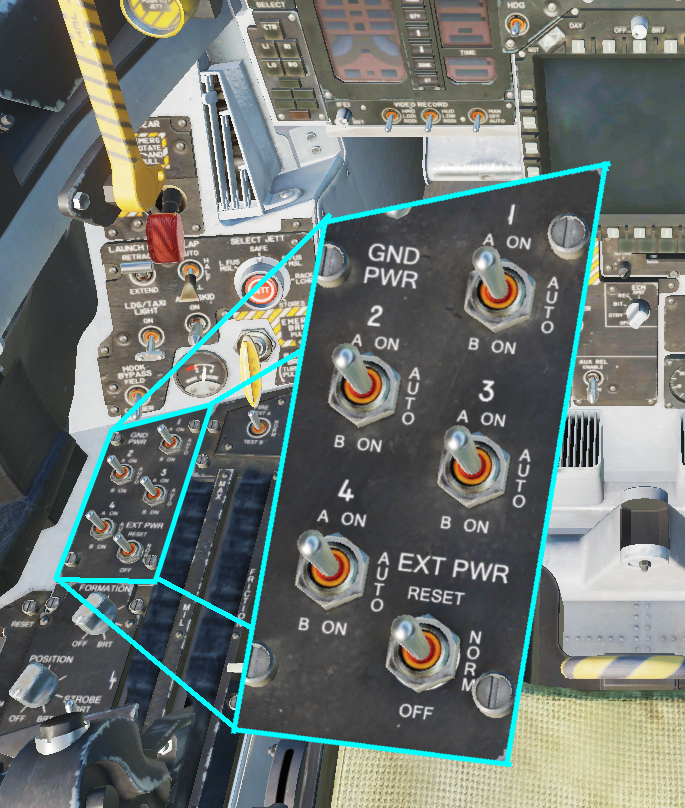
手順は無線 → F8 ground crew → F2 Ground Power→ F1 On
接続完了しても自動でonにならない。左前にあるスイッチを手動でonにする必要がある。全4か所
メインエンジンが起動し電源供給が始まるとスイッチはoffになる。
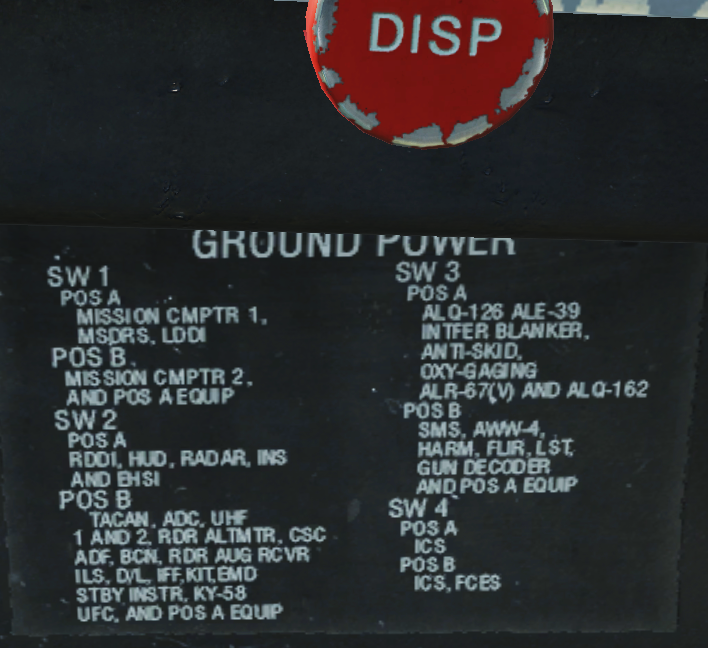
左側面にある赤いフレア/チャフの緊急射出ボタンの下に各スイッチの対応する内容が書いてある。
A側に倒すとAのみ、B側に倒すとA/B両方に通電する。
外部起動メインエンジン立ち上げにはエアーの接続と供給が必要になる
手順は無線 → F8 Ground Crew - F5 Ground Air Supply - F1 Connect
接続が完了したら、F8 Ground Crew - F5 Ground Air Supply - F3 Apply
これで立ち上げるための供給が完了する。
ここからBleedAirを閉じてエンジンの片方をidleにすると出力が上がる立ち上がる。
立ち上がるとエアー供給が切断されるので再び無線-F8-F5-F3で適用し、BleedAirが閉じていることを確認してもう片方のエンジンをidleにする。
両方のエンジンが立ち上がったらGroundPower/AirSpplyを切断する。BleedAirの開放も確認する事。
AoA - Angle Of Attack
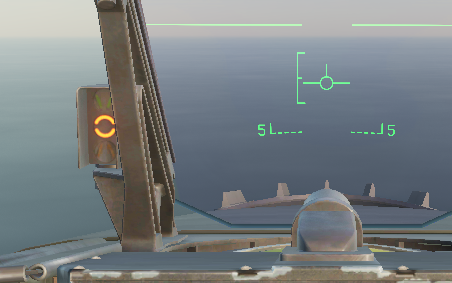
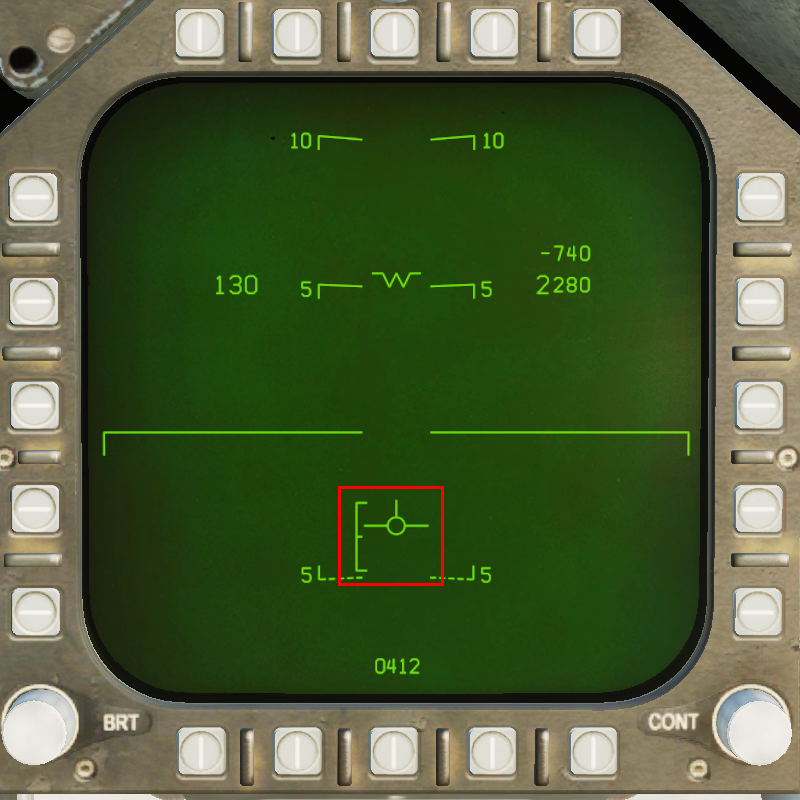
和訳で迎え角。Velocity Vectorと、Eブランケットが並ぶようにトリム調整して水平飛行すると機首が大体+8度の迎え角になり、AoAIndexerがオレンジ色になる
この水平飛行状態化から出力を落とし(機首を下げてはいけない)Velocityを-3度付近にすると降下率が800feet/min(fpm)前後になり着艦に適した状態になる
AoAIndexerが緑色なら着艦する前に空中でワイヤーを掴むので叩きつけられ、赤色なら着艦してもワイヤーに届かずbolterになる可能性がある。
参考動画:DCS F/A-18C #3 - Understanding "On Speed" AoA
3:01 - Why AoA is important with carrier examples
Navigations(UFC+HSI)

航法関連。ココではHSIを併用して方位や距離を確認して目的地に飛んだり帰還したり。
FA-18Cが積んでる"ARC-210"の対応周波数帯は以下
種別 周波数(MHz) 緊急周波数(MHz)
(GuardChannel) FM 30-87.995 AM** 108-135.995 121.5 AM/FM 136-155.995 FM 156-173.995 AM/FM 225-399.975 243.0(AM) **108-117.995は受信専用?
ノイズはSQCHを有効化することで抑制できる
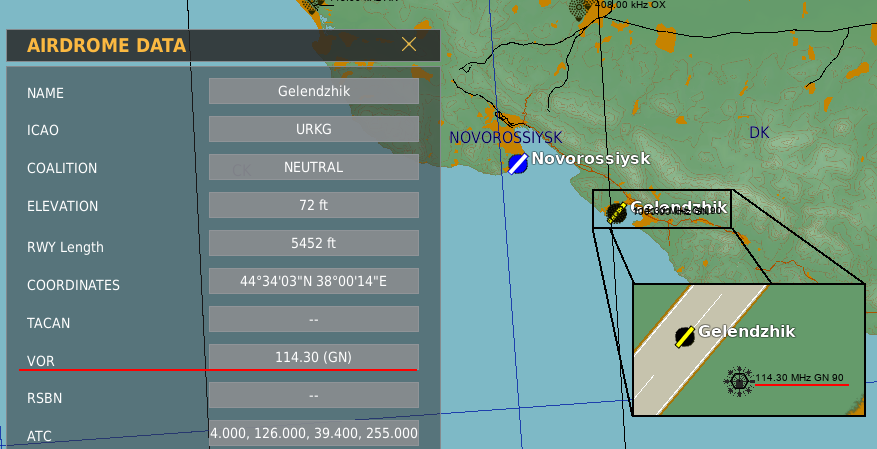
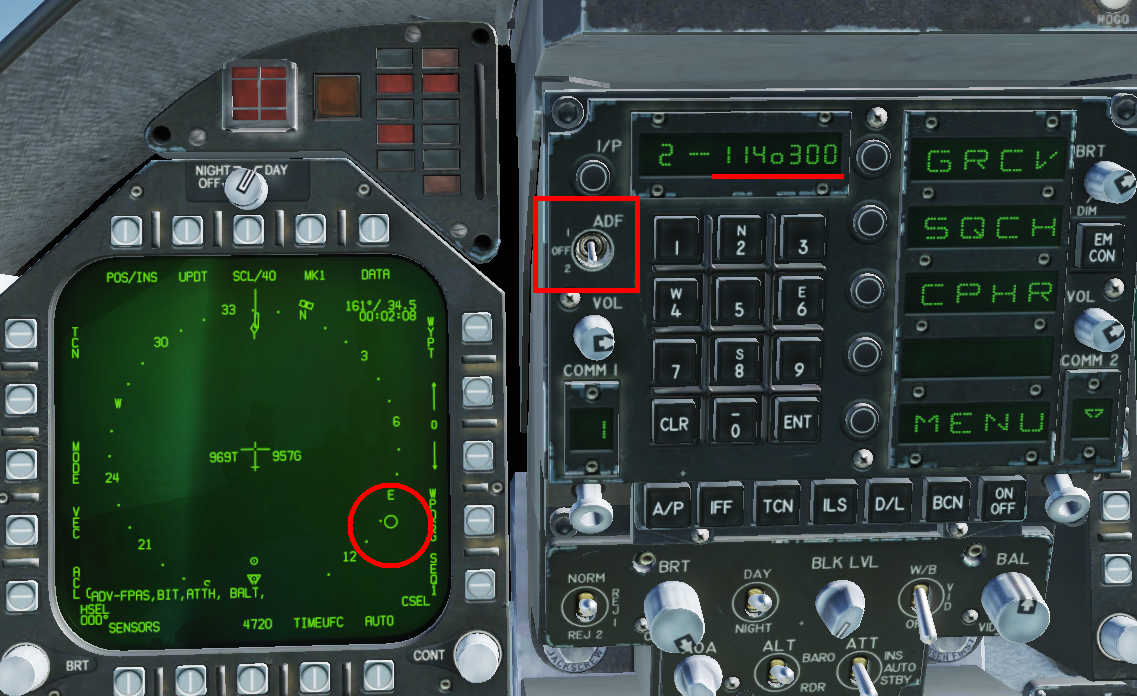
VOR+ADF
F10mapやブリーフィングで目的地周辺のVORを確認。
VORの周波数に合わせて(赤線)、ADFスイッチを有効化(赤四角。1番なら上、2番なら下)
そうするとHSIに電波局がある方向に〇が表示される(赤丸部分)
この表示は水平飛行をしていないと大きくずれるので注意。
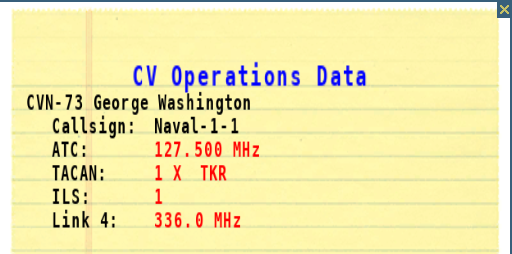
TACAN/ILS/DataLink4合流が難しい空母や空中給油機といった動的ユニットにたどり着くときに使う。
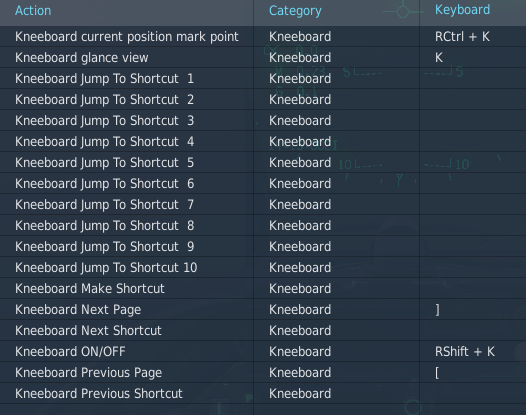
空母のTACANはニーボードから確認できる(デフォルト:K)
表示される数値は変化しても即反映される。不思議端末。実際はどうなん?
TACAN , ILS , Link4をそれぞれ、TCN , ILS , D/Lに入力する
ATCはラジオ周波数なので自動設定(EasyCommunicaton)が有効化されているなら特段気にすることはない
ビーコンが見つかると赤三角にあるテトラポットのようなマークが出現する
縦細長〇のTCN/ILS/Link4各項目を選択するとHUDにデータが表示される。
DDIとMFCDの解像度


各種センサー類の映像を見れるDDIとMFCDの解像度は設定から256/512/1024の三段階が選択できる
低設定でも大きく差が出る。センサー越しの戦闘をするときは可能な限り大きい解像度を推奨。
下記画像はモニターリソース以外を最低値にした時の比較。左が256で右が1024
ライトニングポッド+Narrow+最大ズーム。ターゲットまでの距離は約8nm
CCD
FLIR-黒hot
FLIR-白hot
[途?]A-A Radar


レーダー性能は" F15>F18≒F16 "らしい。
レーダー反射断面積(Radar cross-section)の数値が大きいほど遠くから発見される。
Datalink機能を使うことで自機が発見できなくてもレーダー画面でシンボル共有することは可
ただし、共有のみで自機発見していない場合は直接ロックオンはできない。
RWS/TWSの捕捉前はほぼ同じ挙動、ロックオンするとRWSはロックした1機のみを追尾し確実な情報を提供する。
対してTWSは所謂マルチロック機能があり、ロックした以外の機体も表示できるが予測補正で追尾するので見失いこともある、らしい。
TWSは警報が鳴りにくいので、射出したミサイルのレーダー波が到達したときに初めて敵機のRWRが反応して回避することが難しくなる。この辺の解説はchuck's guide参照(丸投げ)
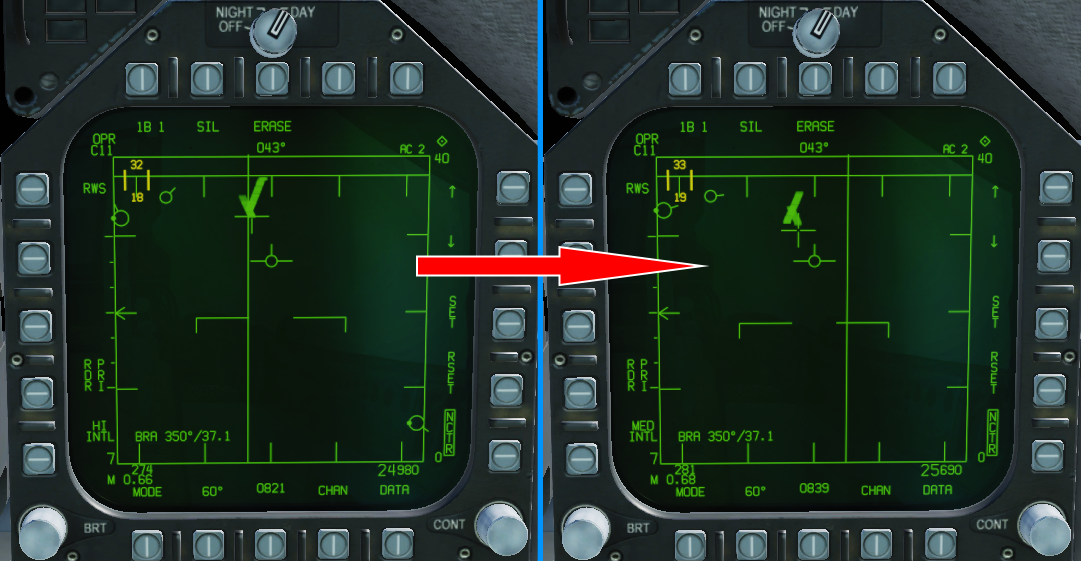
離陸/発艦する前にレーダーコンタクトの緑色の長方形(ブリック)が残る時間をDATAから数字上のボタンを押して2秒から32秒にしておく
極端に短い場合、遠距離索敵だと次の走査線が来る前にブリックがレーダー上から完全に消え、新規なのか既知なのか判らない事がある。
逆に発見後、機数が多く軌跡が残り過ぎて分かりにくい!と言った場合は適時短くしていこう
最長の32秒に設定した例。機体が交差したことがわかり、追っていた機体が変わっている!?という事も減る。
HI/MEDレーダー波のHi/MED切り替えは自動と手動があるが、25nm以上ならHI、以内ならMEDが適しているとかなんとか
25nm以内だからMEDしても見つからないときは、一度HIに切り替えてからMEDに戻すと正常に動作する。バグか仕様かは知らぬ
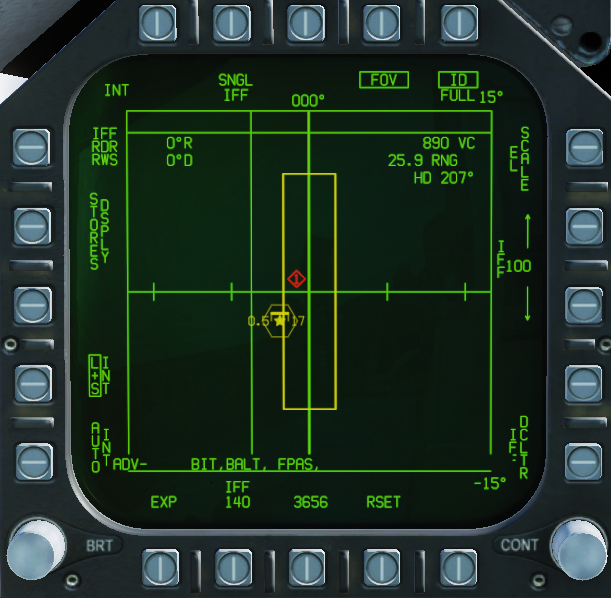
AZ/EL対空モードを展開後に対空レーダーが稼働すると、反対側のDDIでAZ/EL(azimuth/elevation)が選べるようになる
通常のレーダー画面でも敵機の高低差は判るがカーソルを合わせる手間があるが、AZ/ELを使えば視覚的にわかりやすくなる
黄色い四角枠はレーダー走査範囲。六角形のシンボルは観測ポットを積んでいると表示され、どの範囲を映しているかがわかる。ロックオンすると敵機を追尾する
私もお勉強中。もうちょっと待って
AtG - AGM-88C HARM





AIM-7をベースに作成されたAGM-45 Shrikeを改良したHigh-Speed Anti Radiation Missile、和訳するなら高速対レーダーミサイルとかそんな感じ。頭文字をとってHARM
捕捉できれば小さい旋回半径で180度回頭、母機とは反対に飛翔できるぐらい小回りが利く。
利きすぎて味方防空ユニットを粉砕する姿がマルチ鯖で時々見られる。発射設定は気をつけようね!
発射モードは以下3種
TOO (Target-of-Opportunity)
HARMのシーカーを使ってレーダー波を探知、ターゲット選定が必要
PB(Pre-Briefed)
座標地点に向かって特定の電波を出すターゲットを狙う。座標とターゲット電波の入力が必要
SP (Self-Protection)
敵レーダーに捕捉されたときに使用。ターゲット選定が必要
PBは敵AAユニットが非稼働時でも射撃できるが、TOO/SPはレーダー稼働していなければ選定できないので不可。
SPモードはPullBack機能があり、これは他の兵装を選んでいても解除することなくHARMをSPモードで射撃する事が可能になる。
兵装解除する必要がないということは、HARM射撃後のMAVや誘導兵器の再alignのために一度離脱して…といった手順が省けるのである。
下記説明ではAGM-65Fを選択中にHARM-SPを撃つ手順となっている
ストア画面右下赤枠、SP [HARM OVRD]を解除する
すると画面中央赤枠がARM PLBKからARM HARMに変化し、HARM RTBYからRDYになる
TAC-EWからHUDに表示する設定にしていれば下記図のようになる
⇒
(∩´﹏`∩)パトリオットこわぁ……
"RAID/FLIR FOV Select Buttom(デフォルト:Iキー)"を押して目標のユニットを選定すると四角で囲われ射撃が可能となる。ターゲットが複数ある場合はボタンを押すたびに切り替わる。
Pullback機能はChuck’s GuideのP.473で解説している。
(同ガイドでは"Pullback Sub mode"の表記)
射程/高度による射程距離は以下(RedKite氏のチュートリアル5:30より)
高度が高ければ高いほど射程は長くなるが、その分発見率も上がるため迎撃される可能性は上がる。
Range(nm) Altitude(ft) Airspeed(IAS) 70 40,000 380 50 30,000 400 35 20,000 400 25 10,000 400 15 5,000 550
[募集?]稀によく見るエラーメッセージ達
時々出ては消える厄介な連中。
・外部燃料タンク云々→何かが原因で正常に吸えなくなった。速度を落としたり水平飛行していればそのうち治る
・タービン?ブレードがなんだって?→タービンが処理できる以上の空気流入で破損の危険。速度を落とす
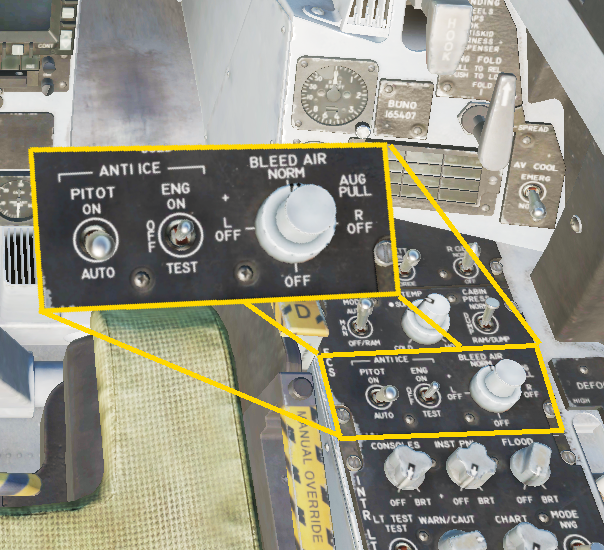
・ふろーずん?アイス?→雲の中を飛行すると着氷で色々死ぬ。ピトー管やエンジン周辺を温めるスイッチがある。
・タキシング中にフラップやトリムがどうのこうの
→出力が一定以上になると離陸すると判断して適正ポジションにないと出る
・兵装が使えない→ギアに障害があると射出できない。カバーが飛んで行っても不可。
250kts超えると損傷するのでそれまでに格納。
見たけどよく分らんわ
ごめんなさい。頑張って追記するんでコメントくれると嬉しいです
[途]ACLS - 自動着艦
Automatic Carrier Landing System
TACAN/ILSとは別にDataLink4を着艦する空母の周波数に合わせる必要がある。
Link4の誘導機能はcase3でのみ使用可能
Matt Wagner氏のガイド。
↓こちらはFreeCarrierでの手順
以下大雑把なcase3手順(SuperCarrierの手順。FreeCarrierは異なるかも?)
50DME以遠でinboudを空母に連絡
(※DME…距離測定装置を使った計測であることを示す。数値は海里[nm])
無線で進入角や周回トラックの位置の情報が来るので向かう
順番が来たら"Commencing"で周回トラックから着艦コースに入る
・以降飛行速度は250ktsを維持。ATC(automatic throttle control)を使う事を推奨。
・4000fpmで20DME/5000ftまで降下
・通過したら"platform"2000fpmに緩め、10DME/1200ftまで降下
・連続着艦する場合、20-12DMEで調整するが割愛。
Commencing/Platformを宣言するとACLの表示にある'DATA'が点滅し、状況に応じた個所が更新される
10DMEに到達したらAoAへ移行、8DMEまでに完了しOn-Speedを安定させる
・10DMEから着艦に関する無線交信が自動で始まる
・無線完了後、オートパイロットモードのCPLを有効化すると自動着艦が有効化される
・3DMEまでに完了しないとwave off隣手順が最初からになる?
3DMEに到達するとFinalBearingとなり、着艦に向けた作業になる
・ILS/ACLを利用し旋回無しの降下
・3/4mileでBallCall、あとはcase1と同じ行程。
何かしらの理由で着艦失敗した場合は
・150ktsで1200ftまで上昇
・180度反転、空母から2nmの距離を取る
・4nmを通過したら反転、FinalBearingからやり直すことになる
・連続着艦の後続機は6nm/8nmの距離で反転する
Source: https://steamcommunity.com/sharedfiles/filedetails/?id=2814242755
More DCS World Steam Edition guilds
- All Guilds
- Su-25T Weapon Overview
- DCS World Ka-50 Startup Guide
- DCS launch error(STEAM VER) SECURITYCONTROL: Can't run Steam!
- F-16C Viper | Launch F-16C Viper
- Mirage F1: Tips and Tricks
- How to actually fly in DCS
- JF-17 Thounder Basics
- Jak naprawi to pierdolnite instalowanie
- I can't believe this is "FREE" in DCS !!! (Helo World)
- DCS World Steam Edition Guide 541